ROBOTICS
FileMarket AI Data Labs
Get Paid to Train Robots with Your Actions & Voice.
Join the dedicated robotics data collection platform. Provide speech and egocentric data for Physical AI and earn rewards for every successful session.
Start Earning NowSearching for high-paying tasks...
Human Perception
Recognition Lab
INIT_PROTOCOL: VISION_RECOGNITION
SOURCE: EGOCENTRIC_FACTORY
DATA: SKELETON_PERCEPTION_SYNC
Vision Lab
Egocentric Motion
Active
High-fidelity 6-DOF tracking for humanoid manipulation and environment mapping.
Recognition
Human Perception
Active
AI models for skeletal posture estimation, intent prediction, and facial biometric analysis.
Audio Hub
Dialect Synthesis
Active
Multi-lingual speech datasets used in LLM voice generation and emotional recognition.
Sensor Array
Tactile Pressure
Active
Real-time pressure mapping for robotic hand manipulation and force feedback.
Kinematics
Skeletal Mapping
Active
Full-body human motion capture for humanoid robot imitation learning.
Protocol
AES-256 Pipeline
Active
Military-grade encrypted data streaming for top-tier robotics labs and researchers.
THE DATA
FACTORY.
We run an egocentric human-motion data factory with staged environments for embodied video.
400k+
Samples Validated
24/7
Lab Capture
High Fidelity
Zero-loss sensor capture pipelines.
Case Studies
Proven results in Human-Robot interaction.
Hardware Prototyping
Engineering Lab
INIT_PROTOCOL: HARDWARE_BUILD
SOURCE: ROBOTICS_TEAM_X1
DATA: ACTUATOR_STRESS_TEST
Internal Robotics Team
We dont just use AI; we build the robots that power it. Our in-house engineering team prototypes custom robotic skeletons and actuators to push the boundaries of embodied intelligence.
In-House Manufacturing
Rapid Build Cycles
Multidisciplinary Team
Our Own Hardware
Data Acquisition Unit
PRODUCT_ID: EDCU-1_PROTO
BUILD: IN-HOUSE_SQUAD_01
STATUS: ACTIVE_DEPLOYMENT
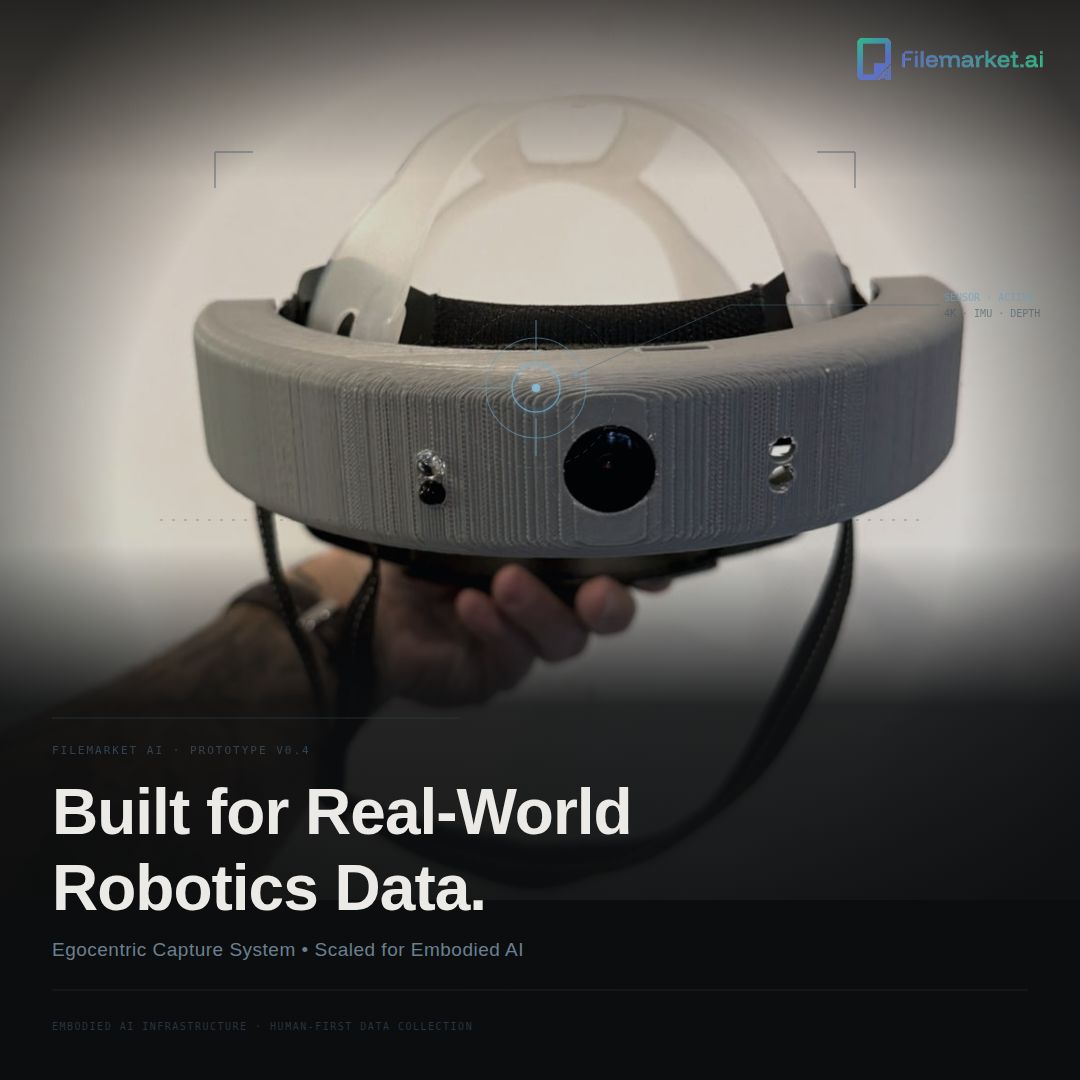
Built for Robotics Data.
Off-the-shelf hardware isnt enough for the next generation of embodied AI. We engineered the **EDCU-1**—our own proprietary data collection headset—to capture high-fidelity human motion and egocentric vision that standard cameras miss.
Custom PCB Design
Proprietary Firmware
Hardware Specifications: